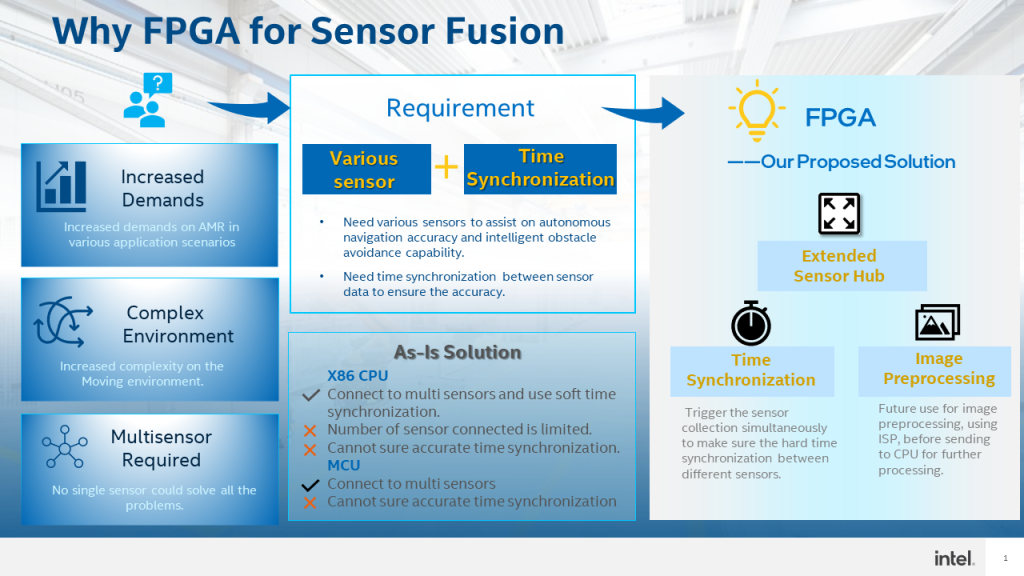
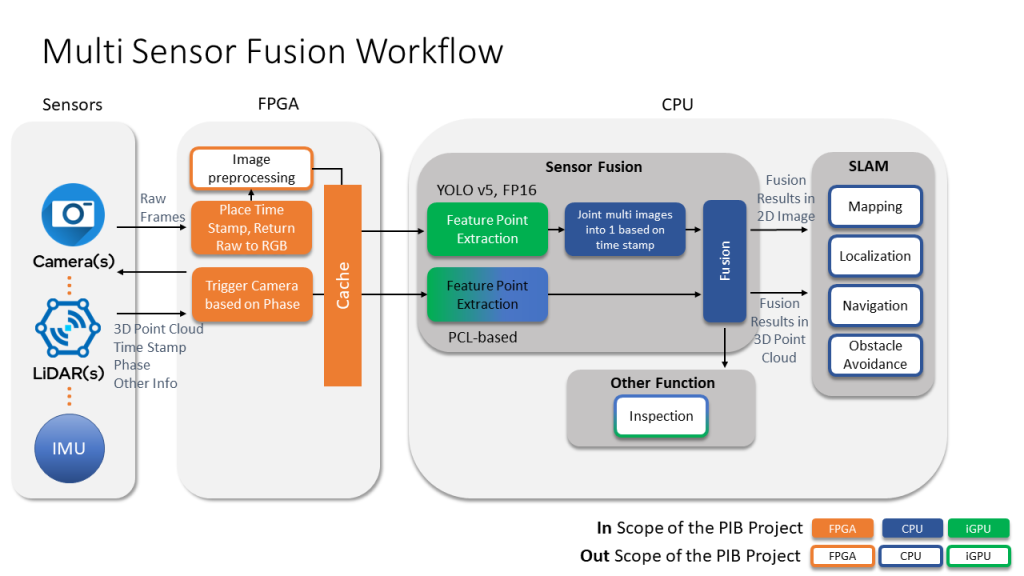
传感器融合 简介 原理框图 图片及视频演示 项目工程 开发者介绍 简介 用于估计机器人状态的多传感器融合系统可分为感知自身运动信息的本体传感器(如编码器、磁力计、轮速计和惯性测量单元等,其中惯性测量单元使用最广泛)和感知外部环境的传感器(如相机、激光雷达和毫米波雷达等)。 原理框图 图片及视频演示 项目工程 开发者介绍